Guglielmo Gemignani
Head of Robotic Integration at Magazino, with a background in physics, robotics, and AI.
I build autonomous systems that combine dependable behavior, practical reasoning, and research-driven engineering.
See selected work Read about me
Profile
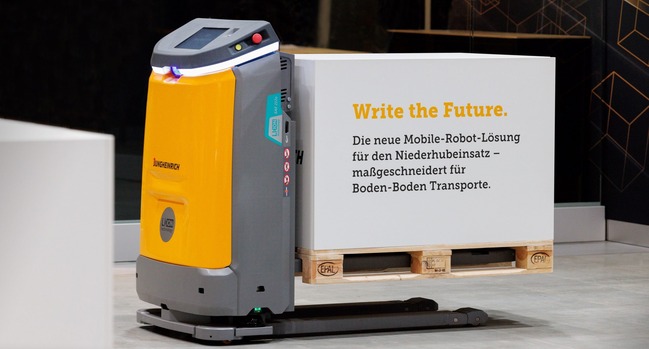
I currently work as Head of Robotic Integration at Magazino GmbH, where I lead the integration of autonomous warehouse robots from system architecture to behavior design and quality assurance. My work sits between research and product: turning ideas about planning, control, and reliability into systems that have to perform in the real world.
My background spans physics, robotics, and artificial intelligence. I studied at Sapienza University of Rome and the University of Pisa, then completed a PhD in Robotics and AI at Sapienza, including a visiting period at Carnegie Mellon University. Across industry and academia, I have focused on robot behavior, knowledge representation, planning, and human-robot interaction.
I am most interested in how intelligent behavior can be made both expressive and dependable: how a robot reasons about action, learns from interaction, and still behaves robustly in complex settings. That question still drives the projects I choose, the systems I build, and the research I continue to follow.
Selected work
A curated selection of research, industrial systems, open-source contributions, and long-form work.









Contact
If you would like to discuss robotics, research, or collaboration opportunities, feel free to reach out.